- Role
- Solo developer for the LiDAR SLAM and map-based localization stack
- Timeline
- May – Aug 2025
- Context
- UT Dallas NOVA Team
- Accuracy
- Sub-5 cm vs GPS truth
Overview
I forked and extended KISS-ICP, KISS-SLAM, and Map-Closures so the same stack could do offline
SLAM, real-time localization against a pre-built static map, and additive mapping — all from a
single ROS2 package with three nodes (mapping, localization, map_addition).
The problem
The NOVA team needed localization against a pre-built static world map, not just the dynamic
local maps the off-the-shelf KISS-* libraries produce. They also needed to start SLAM at a
non-origin keypose (so maps stitch cleanly to an existing global map) and close the loop against
that global map — not only against recent local scans.
Highlights
Loop closure against a global map
Stock Map-Closures only matches recent local maps. I added a cv2.ORB detector whose params
scale with point-cloud max dimension, injected the global map into the HBST with a
negative ID, and branched KISS-SLAM to add a pose-graph edge straight to origin on a
negative-ID match.
Non-origin SLAM start
Overloaded KISS-SLAM init to accept an initial KeyPose from config, so maps centered elsewhere
in the world stitch cleanly onto the pre-existing global map.
Static-map localization
Overloaded KISS-ICP init and odometry to localize against a static world map rather than
rebuilding a dynamic local map every frame.
ICP + features together
Combining ICP with feature matching gave robust convergence and the sub-5 cm accuracy the
team needed on bag-replayed data.
Results
- Sub-5 cm localization accuracy vs simulated GPS ground truth on ROS2 bag tests.
- Mapping from scratch (KISS_SLAM), localization from pre-existing map (KISS_ICP modified), adding to an existing map (KISS_SLAM modified) all shipped.
This is a condensed overview.
Reach out for details.
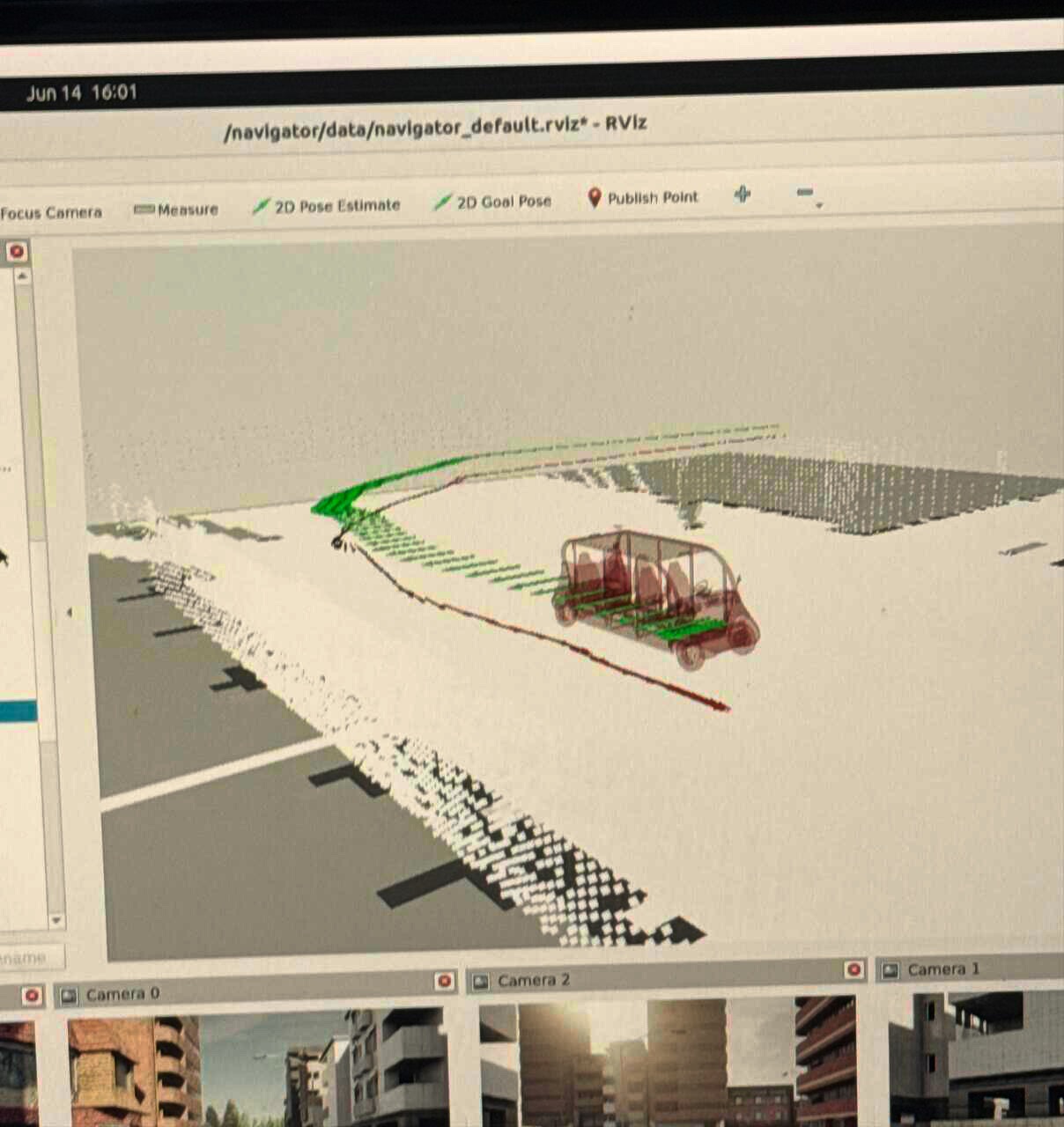 Localization (Red) vs Ground-Truth (Green, always-north-facing, z:0)
Localization (Red) vs Ground-Truth (Green, always-north-facing, z:0)