⤢ Closer look
⤢ Closer look
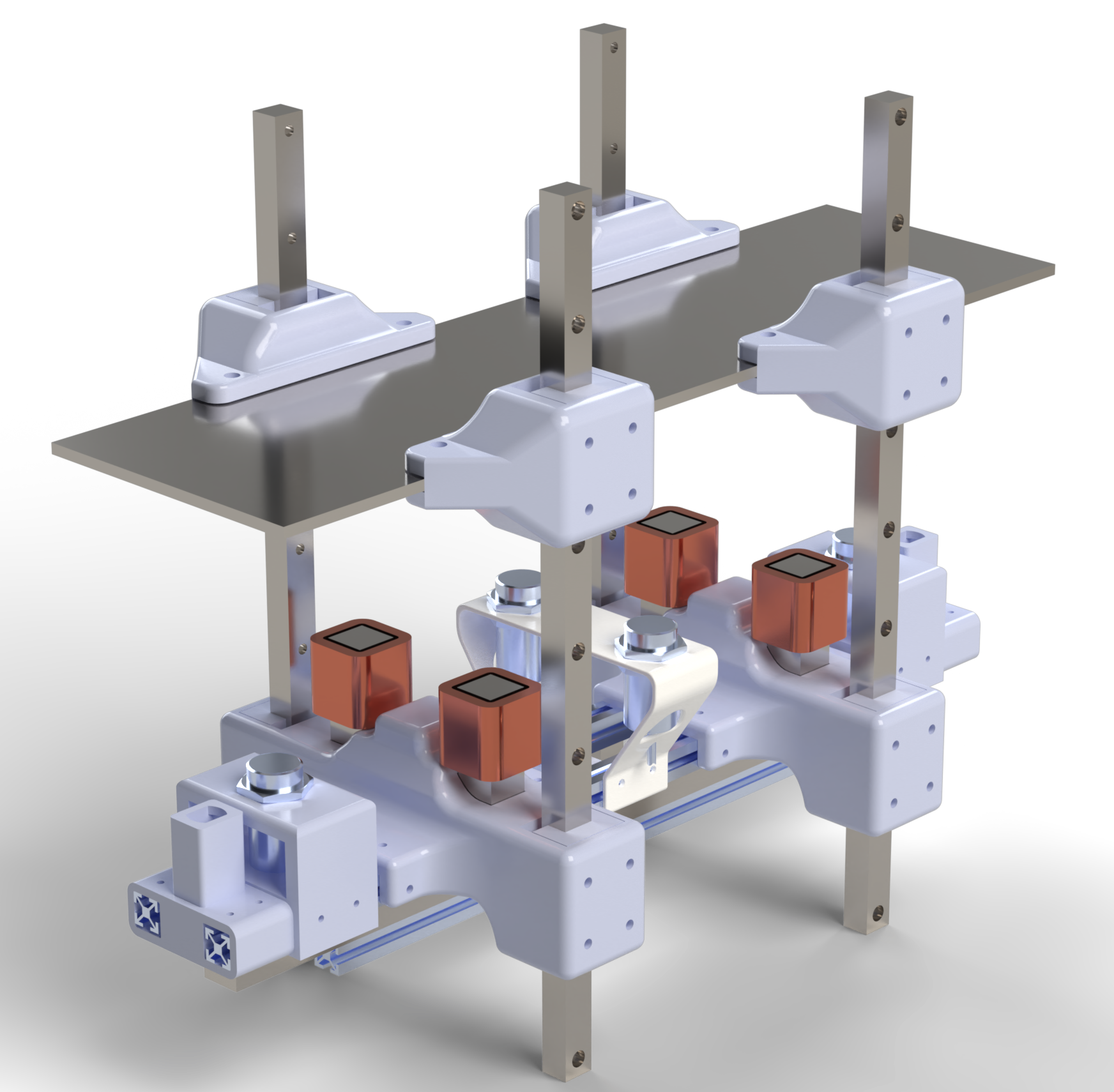
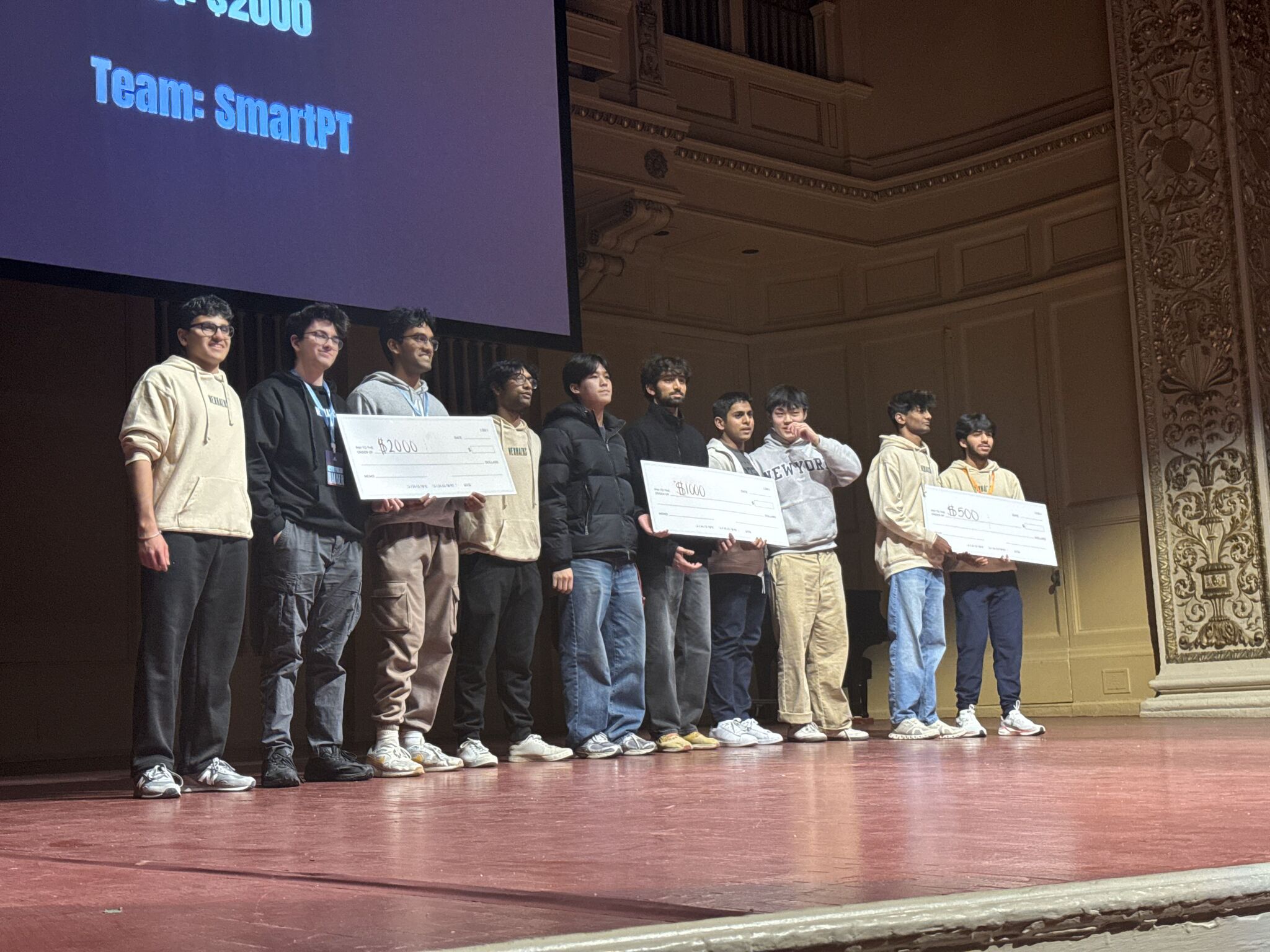
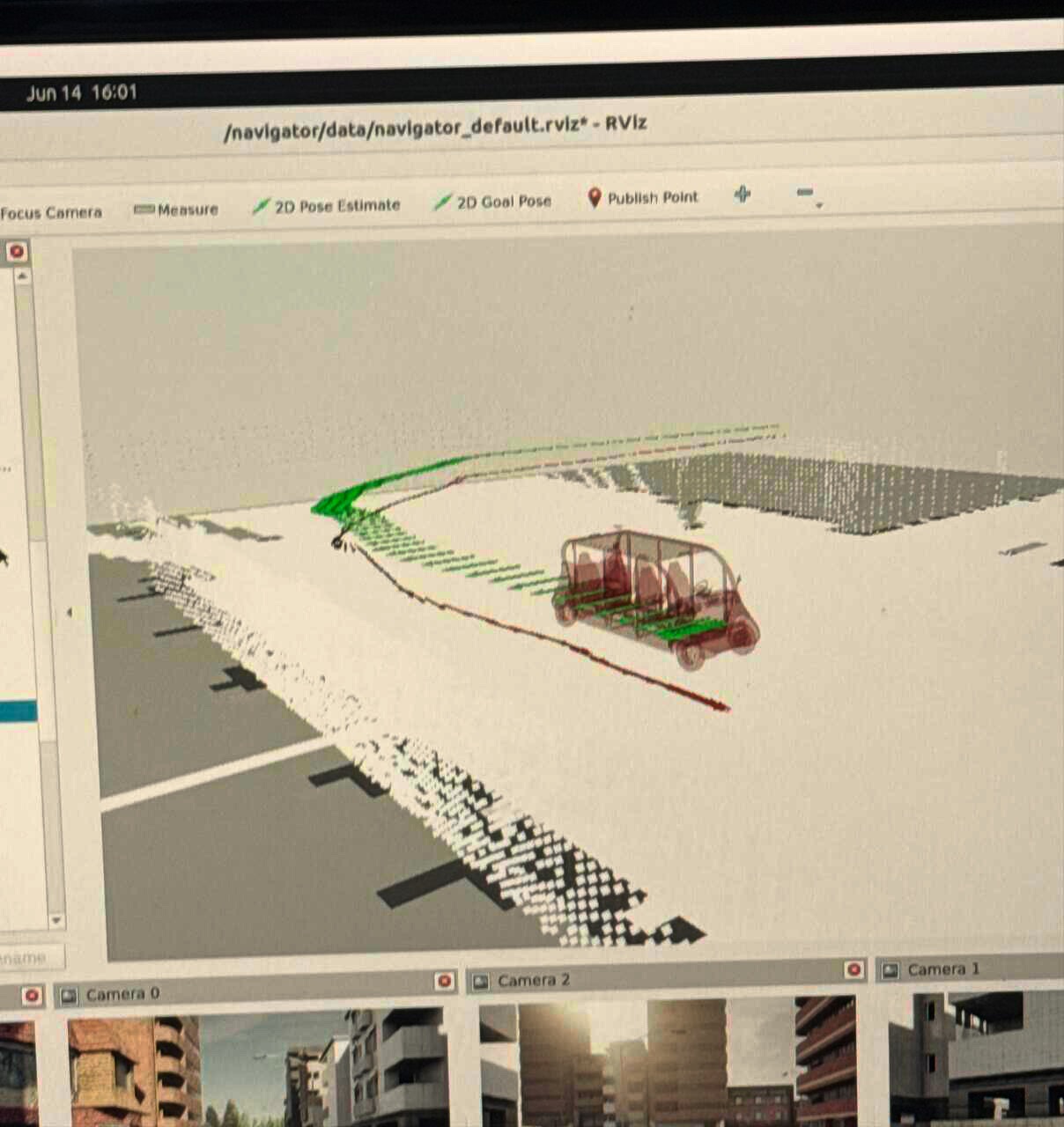
I'm an ECE Honors undergraduate at UT Austin who likes problems that don't fit neatly into "hardware" or "software." I've written OS-level drivers at Qualcomm, shipped flight-control, maintenance, and testing software at Bell Flight, built a LiDAR SLAM localization stack with the UT Dallas NOVA team, and architected prototyping, testing, and control solutions at Texas Guadaloop.
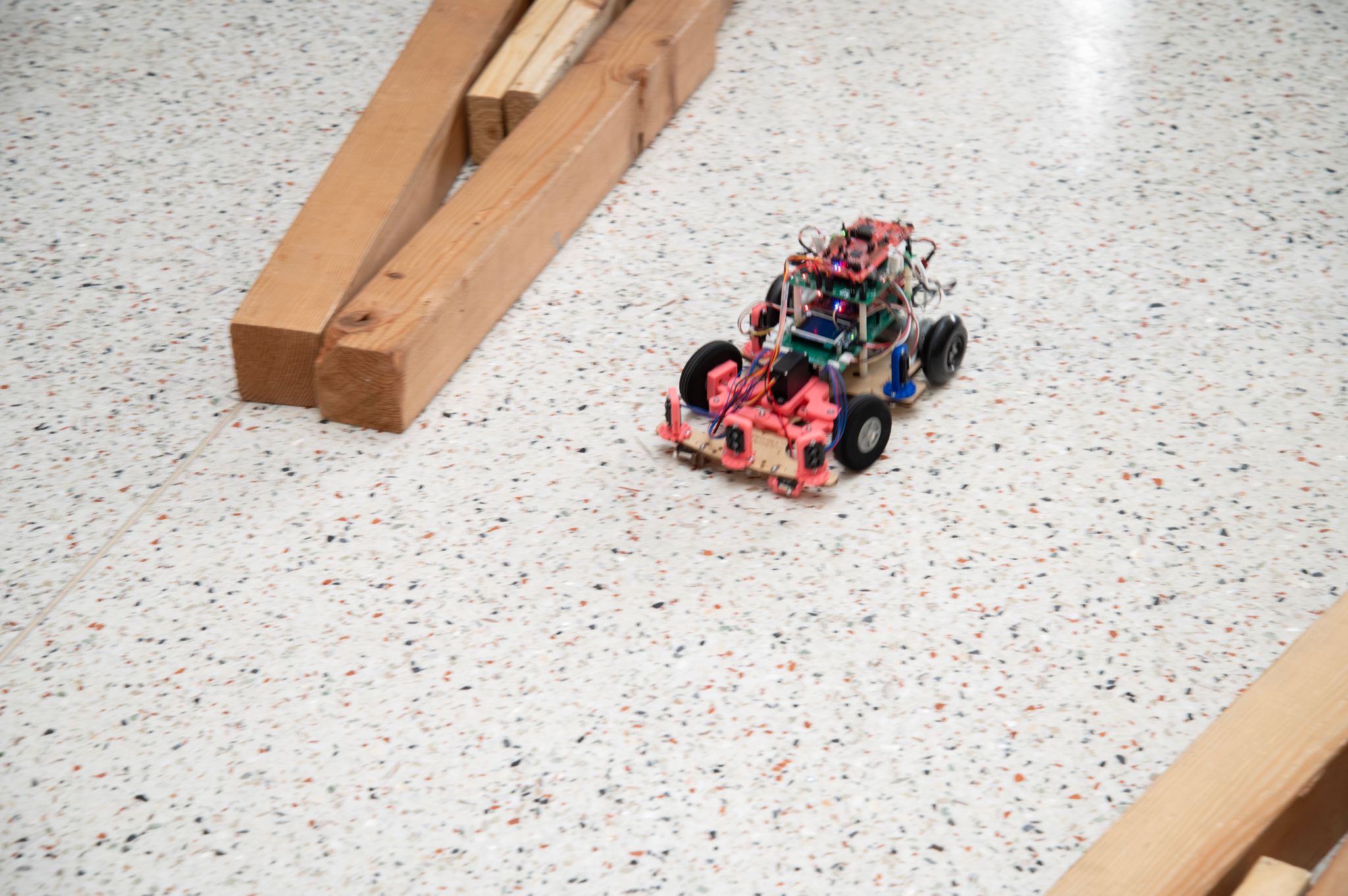
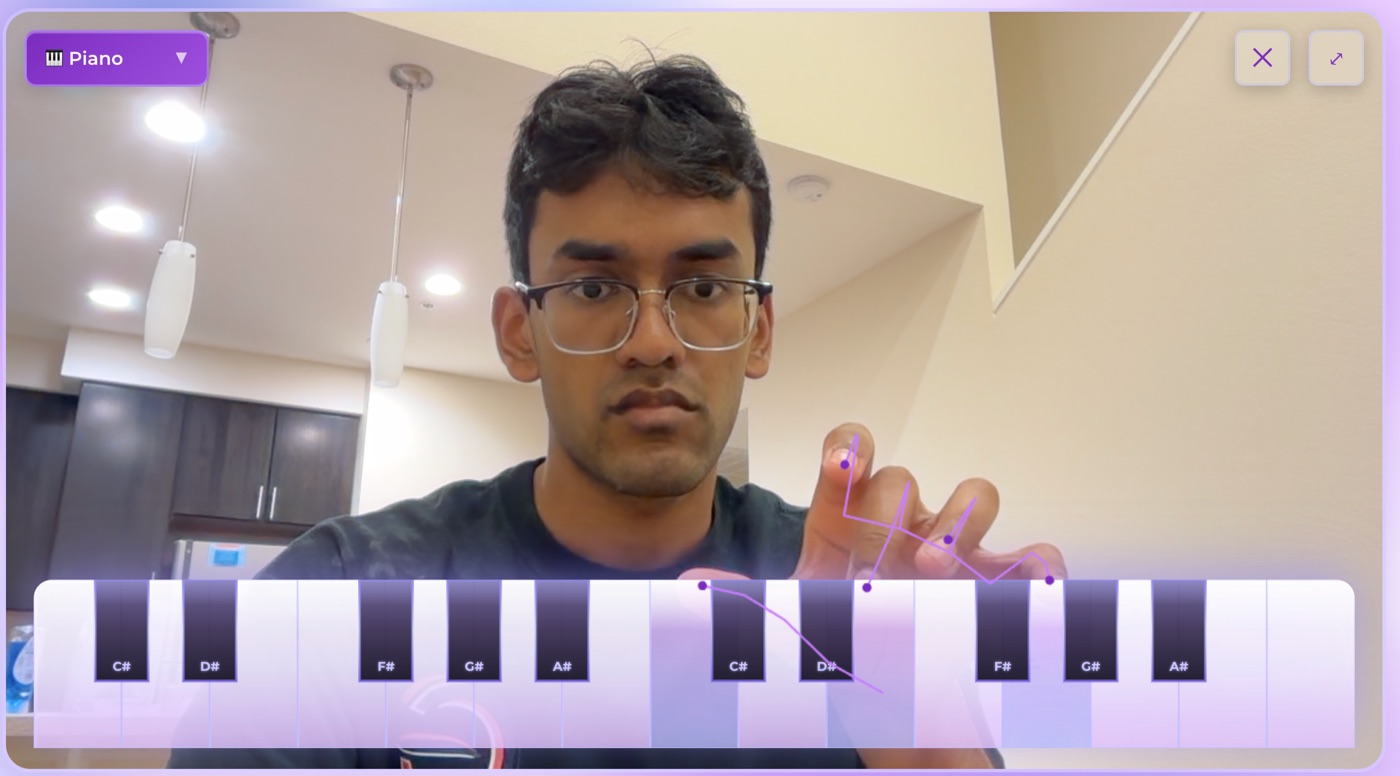
What drives me is seeing my work come to life in realistic scenarios. I've done this through building closed-loop control systems on real hardware, bringing up computer vision systems that function in practical spaces, and working on multiple sensor-fusion projects that solve real problems. I care about systems that are fast, robust, and honest about their limits.
- Based in
- Austin, Texas
- Focus
- Embedded · Robotics · Controls
- Education
- BS ECE Honors, UT Austin '28
- Languages
- English · Telugu · Spanish